La rivoluzione della robotica: una mano strisciante che sfida i limiti della funzionalità umana
Nel panorama della ricerca tecnologica avanzata, una nuova mano robotica sta catturando l’attenzione grazie a una caratteristica sorprendente: è in grado di staccarsi dal braccio, muoversi autonomamente strisciando e poi riattaccarsi, tutto mantenendo un’elevata precisione nel controllo degli oggetti. Questo progetto innovativo, descritto di recente sulla rivista scientifica Nature Communications, rappresenta un passo avanti nel campo della robotica applicata a compiti complessi e dinamici, aprendo scenari fino a oggi impensabili.
Una mano robotica più agile e versatile grazie a un design rivoluzionario
Tradizionalmente, le mani robotiche sono studiate per replicare fedelmente la struttura umana, ma questa nuova scoperta supera tale vincolo, proponendo un design simmetrico e funzionale da entrambi i lati del palmo. Kunpeng Yao, assistente professore all’Università di Leeds, sottolinea come la mano umana non possa considerarsi perfetta: “Abbiamo una mancanza di simmetria e la nostra mano esegue solo un numero limitato di compiti a causa delle sue limitazioni anatomiche. Cosa accadrebbe se una mano robotica potesse superare questi confini e ampliare le sue capacità?”. L’intenzione del team è infatti quella di liberarsi dalle restrizioni fisiologiche per progettare una mano più abile ed efficiente.
Una delle innovazioni più rilevanti riguarda l’uso di più pollici artificiali. Come evidenzia la professoressa Aude Billard dell’EPFL di Losanna, “Perché limitarsi a un solo pollice? Se tutte le dita potessero assumere la funzione di pollice o indice, si moltiplicherebbero le possibilità di presa”. Grazie a questa flessibilità, la mano robotica può afferrare oggetti con combinazioni diverse di dita, aumentando la versatilità e la precisione dell’interazione con l’ambiente.
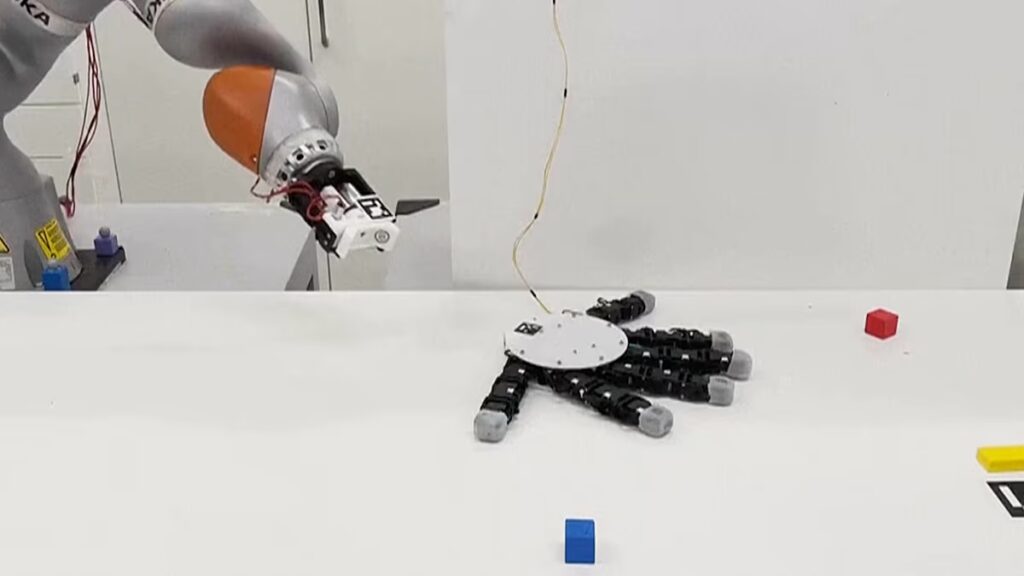
Funzionalità e potenzialità: dalla presa agile al movimento autonomo
I ricercatori hanno sviluppato due varianti di questa mano, una con cinque dita e una con sei, entrambe caratterizzate da un design simmetrico che consente la presa da entrambe le superfici della mano. Nei test sperimentali, la mano robotica ha dimostrato capacità sorprendenti: è stata in grado di separarsi dal braccio a cui era collegata, muoversi autonomamente in modo strisciante, raccogliere fino a tre oggetti consecutivamente e infine riattaccarsi. Tutto questo senza perdere aderenza o controllo sugli oggetti afferrati, confermando un’ottima integrazione tra locomozione, manipolazione e stabilità.
Queste caratteristiche aprono la strada a numerose applicazioni innovative, specialmente in contesti dove lo spazio è ristretto o gli scenari sono complessi. Xiao Gao, della Scuola di Robotica dell’Università di Wuhan, spiega: “In ambienti industriali spesso si trovano condotti angusti o tubature inaccessibili all’interno delle strutture standard. Una mano robotica capace di staccarsi e muoversi autonomamente potrebbe inserisi in questi spazi, oltre a facilitare operazioni di manutenzione o di emergenza”.
Applicazioni future e scenari di utilizzo avanzato
L’integrazione di questa tecnologia rappresenta un’opportunità straordinaria soprattutto per settori come la manutenzione industriale, la robotica di salvataggio e l’esplorazione di ambienti confinati. Le performance dimostrate fanno ipotizzare l’impiego della mano robotica in missioni di soccorso dove la mobilità e la capacità di manipolazione devono adattarsi a spazi angusti o situazioni di emergenza.
Inoltre, il design simmetrico e la diversificazione dei pollici artificiali potrebbero influire sullo sviluppo di dispositivi di assistenza per persone con disabilità o per la robotica collaborativa, aumentando la precisione e la sicurezza nell’interazione uomo-macchina.
Conclusioni
Questa nuova frontiera della robotica con la mano strisciante che si stacca e riattacca rappresenta un significativo passo avanti nel superamento dei limiti fisiologici e funzionali imposti dal modello umano. Il design innovativo e la flessibilità dimostrata aprono prospettive concrete per migliorare le capacità operative dei robot in contesti complessi, dall’industria alla sicurezza fino alla vita quotidiana. La sintesi tra mobilità autonoma e manipolazione precisa conferma come la tecnologia possa evolvere mantenendo un occhio alle esigenze pratiche e tecnologiche del futuro.
In un mondo sempre più automatizzato, progetti come questo anticipano un domani in cui la robotica non solo imiterà la natura, ma saprà anche innovarla, superandone i limiti tradizionali.








